関西大学システム理工学部 機械工学科
ロボット・マイクロシステム研究室
人工知能のロボットへの応用
人工知能のロボットへの応用
人間の脳の仕組みを計算論的アプローチ,心理学的アプローチ,解剖学的アプローチ等により調べる研究が内外の研究機関で多数行われています.われわれはそれらの成果をロボットの外界環境認識,軌道計画,触覚認識等に応用することを目指しています.
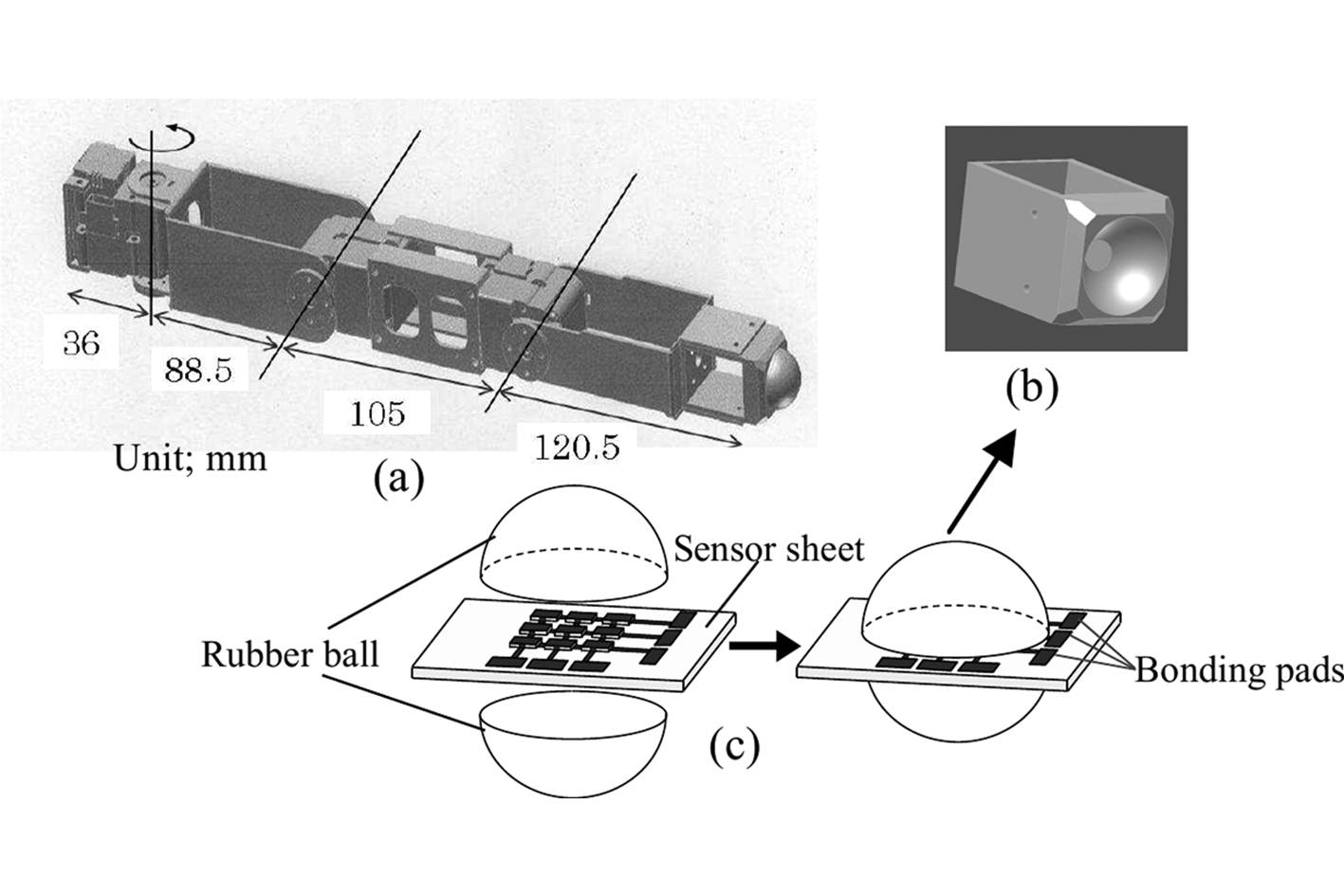
外界環境認識においては,人間が一瞥しただけで部屋のレイアウトを把握できるように,ロボットがオフィス内の機器レイアウトを正確・迅速に行うことを目指しています.距離画像センサを用い,多数の画像を学習することで,AdaBoost (adaptive boosting)判別器を獲得します.この判別器は対象があるカテゴリに属する物体かどうかを判定します.例えば,画像に写っているものが「机」かどうかを判定します.軌道計画においては,遺伝的アルゴリズム(GA)やRRT (Rapidly-exploring Random Trees)といったメタヒューリスティックアルゴリズムと呼ばれる範疇の手法を用いて,ロボットがスタートからゴールに至るまでの最適な軌道を関節空間において探索します.触覚認識においては,MEMS技術で作製したアレイ型触覚センサからの多数の情報をニューラルネットワークで処理し,ロボットの足裏と床との接触状態を検出することに成功しています.
つくばチャレンジ
屋外を自律走行できる移動ロボットの研究開発を行っています。移動ロボットにGPS・LRF・カメラなどの外界センサを搭載し、走行経路の決定・障害物の回避・人物探索などを自律的に行なえるよう日々研究を行なっています。その一環として、つくばチャレンジ(http://www.tsukubachallenge.jp/)に参加しております。つくばチャレンジとは茨城県のつくば市内の実環境を移動ロボットに自律走行させる公開ロボット走行実験です。現時点では完走することができていませんが、将来的に完走できるように日々改善を行なっています。具体的には、屋外での使用が可能なKinect V2センサを取り入れ、距離画像を利用した自律走行等について検討しています。
画像をクリックすると拡大されます。
8倍速で再生しています。
ロボカップ@ホーム
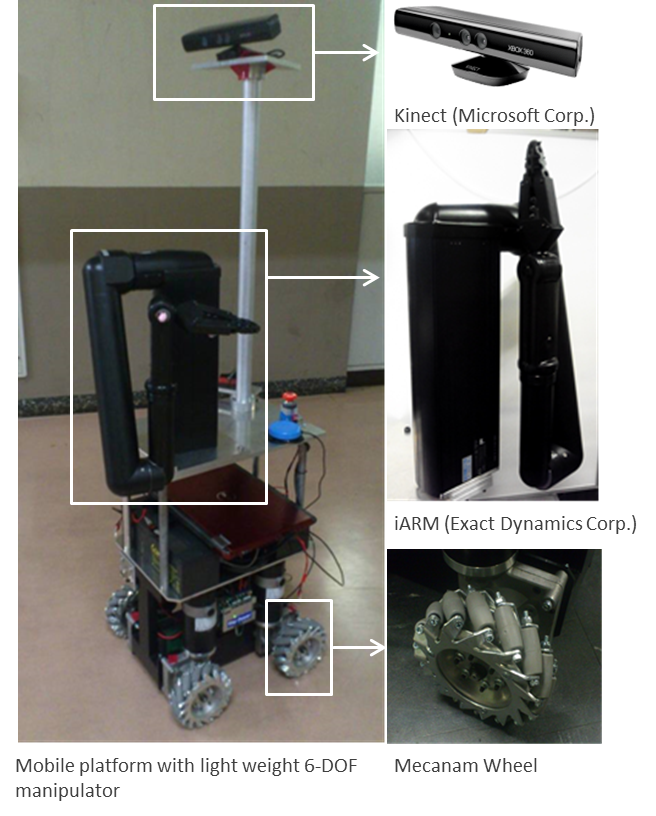
一般家庭や病院等の屋内で活躍できるロボットの開発を行っています。全方向移動台車に軽量小型の多関節型ロボットを2台搭載し、RGB-Dセンサ(距離画像と濃淡カラー画像が取得できるセンサ.Microsoft社製KINECT)から得られる情報をもとに外界環境を認識して、様々な屋内タスクの遂行を目指しています。一例として、机を物体認識し、その場所まで障害物を避けながら移動し、机の上に設置してあるペットボトルを把持する作業を自律的に行うことに成功しています。
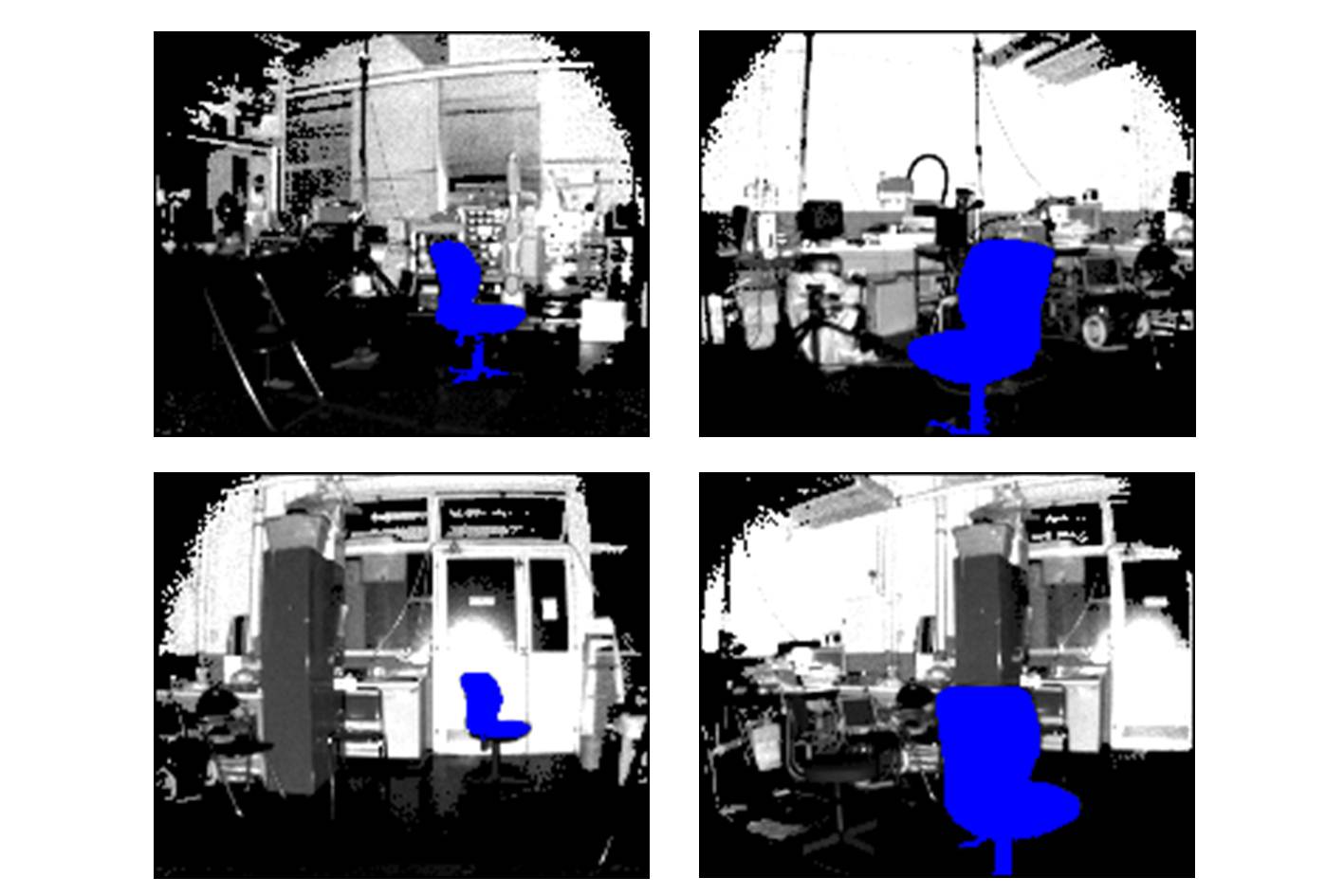
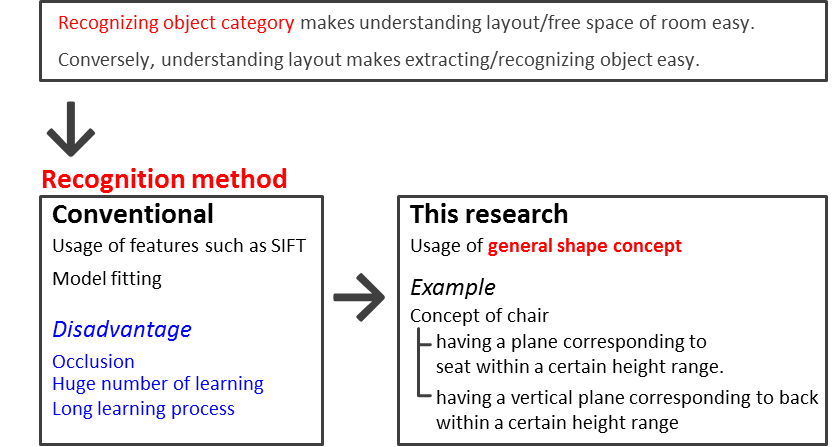
本研究室では物体の認識に形状概念を用いています。形状概念とは、椅子を例としてあげると、一般的な椅子には座面と背もたれがあり、座面は人が座りやすいようにある一定の高さに存在しているといった、物体が持つ形や機能などといった特徴のことを言います。椅子、机、ペットボトルなどの形状概念をロボットに与えることで、人間と同様に信頼性の高い一般物体認識が可能です。
本ロボットの研究開発の一環として、ロボカップ@ホームというロボット競技会への出場を予定しています。ロボカップ@ホームでは生活支援ロボットに必要な技術を開発することを目的としており、未知環境においてオブジェクトを探索して取ってくることや、人間の顔を認識して対象者を追従するといった様々なタスクが設定されています。大会に向けて、物体認識を行うための画像処理、ロボットの自己位置推定と地図作成(SLAM, Simultaneous Localizing and Mapping)、目的地までの軌道計画、ロボットアームでの正確な把持を目的とした機構パラメータのキャリブレーション、人間がロボットに指示を与えるための音声合成・音声認識など、様々なロボット技術について日々研究しています。
屋内でのロボットの作業
RECS (Robot-Environment Compromise System) コンセプト
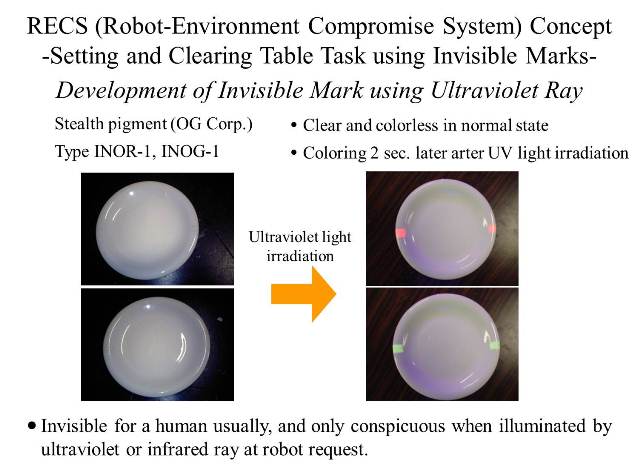
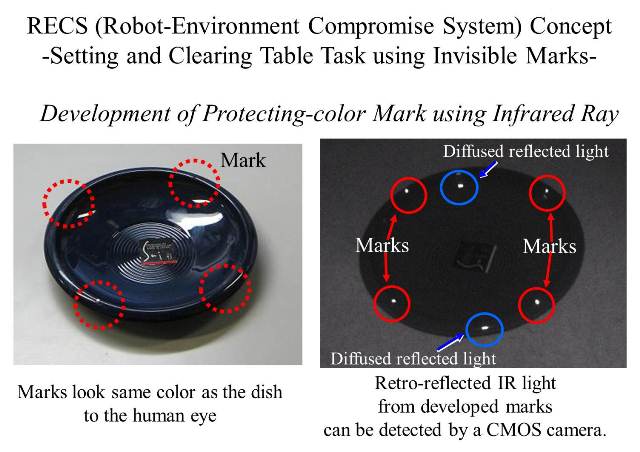
不可視マークを用いた食卓の配膳作業の実現
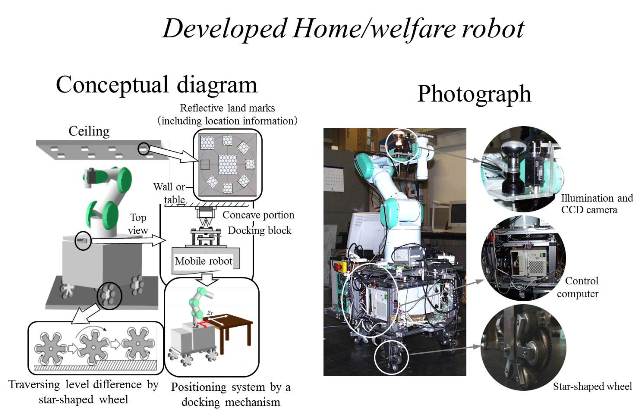
ヒューマノイドロボット等が人間に匹敵する環境認識能力,運動能力を有するに至るには,研究開発にまだかなりの時間が必要であると考えます.しかしながら,先進国,特に日本では少子高齢化が急速に進んでおり,病院内,家庭内といった人間が活動する空間内で人間と共存し,人間が行う作業を代替してくれる福祉・ホームロボットに対する要望が高まっています.このようなロボットの開発は喫緊の課題です.
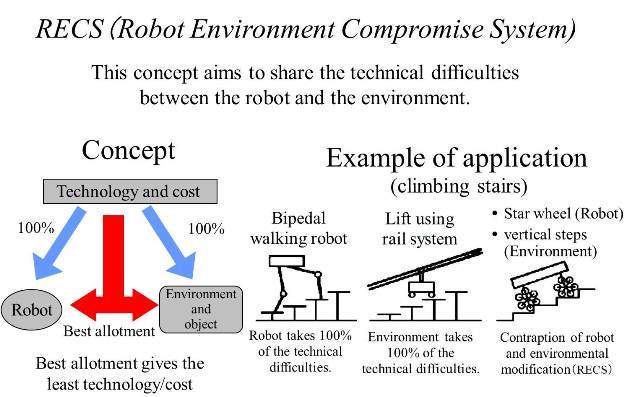
本研究室では,すべての技術課題をロボットに押し付けるのではなく(完全自律型のヒューマノイドの開発を長期的に目指すのではなく),ロボットが動作しやすいように環境を改変する(軽微で,人間の目障りや邪魔にならない程度の改変)ことにより,現状利用可能なロボット技術を用いてタスクの達成を可能にすることを考えています.この考えに基づき,ロボットと環境が協調してタスクの達成を目指すRECS(Robot Environment Compromise System)というコンセプトを提案しています.
このコンセプトに従い,食器等の対象物に通常は人間に全く見えず,認識時のみ色が浮き上がる不可視マークを付与することで環境側の改変を行い,ロボットの画像処理やハンドリングを容易にしています.具体的には,食卓の配膳作業や,洗濯物のハンドリング作業を行うことに成功しています.
移動ロボットによる形状概念による物体認識と物体の把持
物体認識では,距離センサKinectを用いて得られた距離情報を元に距離が近い部分をラベリングし,RHT(Randomized Hough Transform)を用いて平面を検出します.その後,物体の形状概念を用いて物体の認識を行います.形状概念とは,椅子を例としてあげると,座面と背もたれがある高さの範囲に存在する,といったものです.Fig.1に認識のコンセプトを示します.このように,椅子や机,ペットボトルなどの形状概念を与えることで一般物体認識を行い,高い確率で物体の認識を行うことに成功しました.(Fig.2) また,認識した物体を移動ロボットにより把持する実験を行い,これに成功しました.
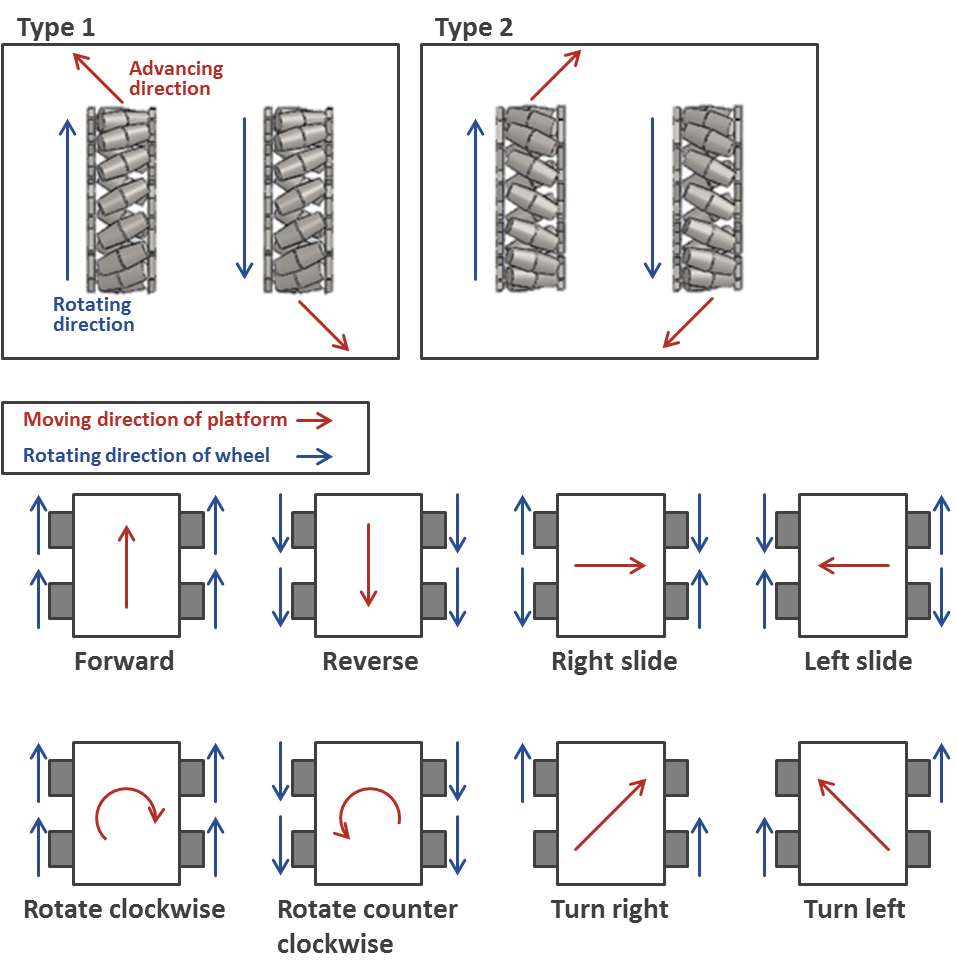
本研究室では移動ロボットの製作を行いました.まず,Solid Worksという3 次元 CAD 設計ソフトウェアを使用し,移動ロボットの動作シミュレーション(Fig.3)を行うことで,より具体的な設計が可能となりました.Fig.4に製作した移動ロボットの全体図を示します.
このロボットの特徴は,メカナムホイールという機構を用いることで,Fig.5のように上下左右斜め移動・その場回転といったように,任意の方向に移動できること,またアームの各軸の可動域が非常に広く,広範囲に存在するものを把持することが出来ることが挙げられます.


自動作曲
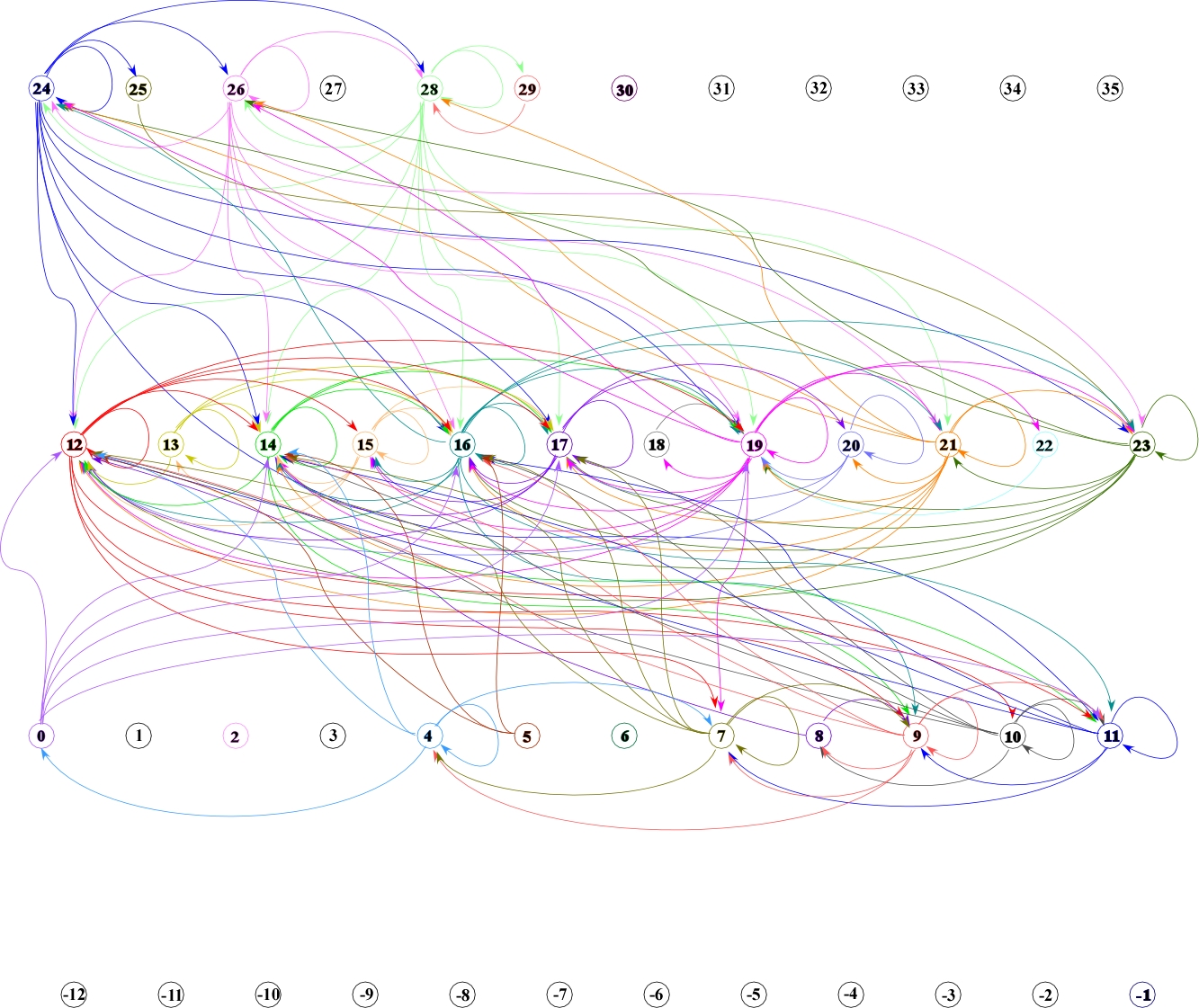
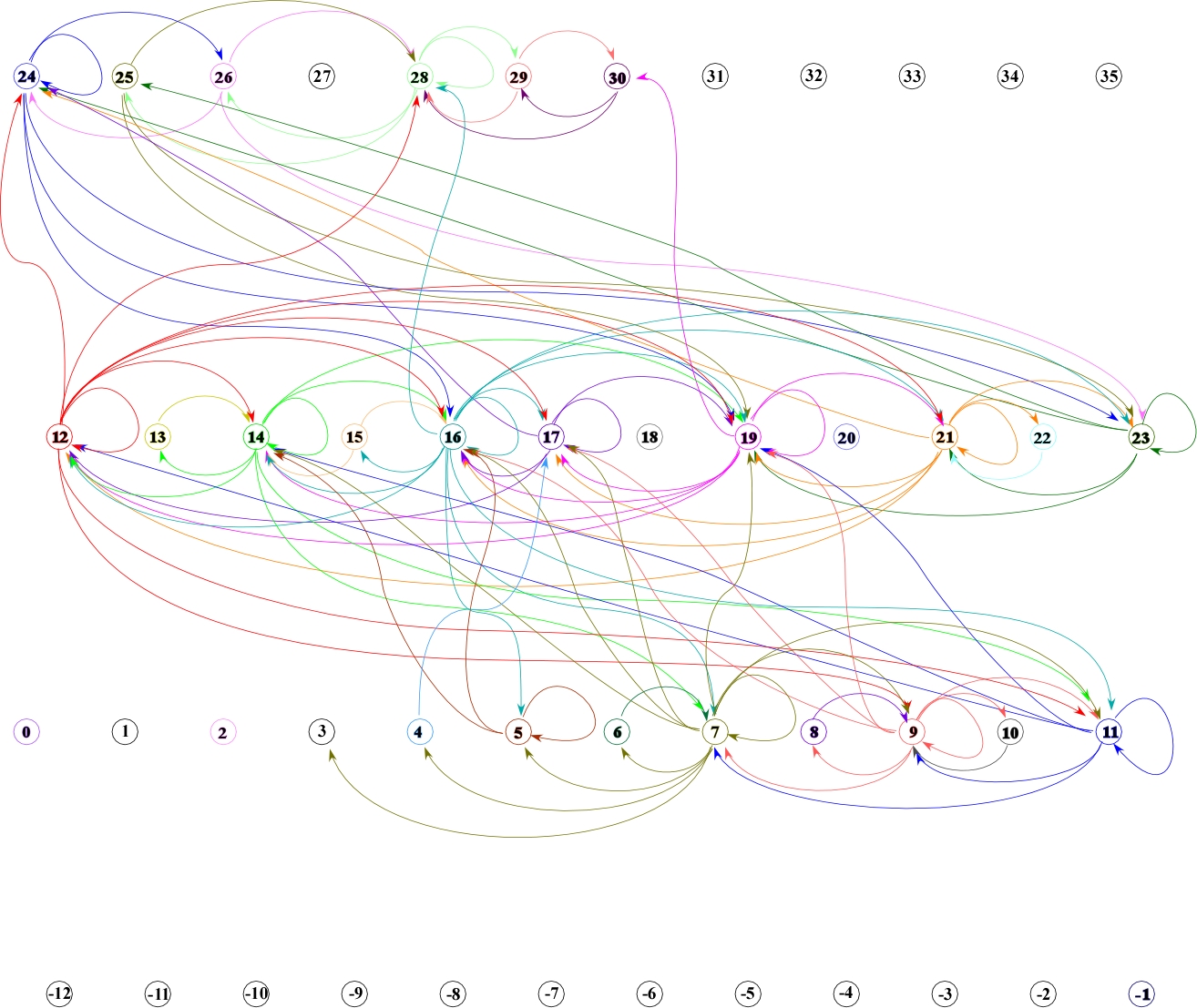
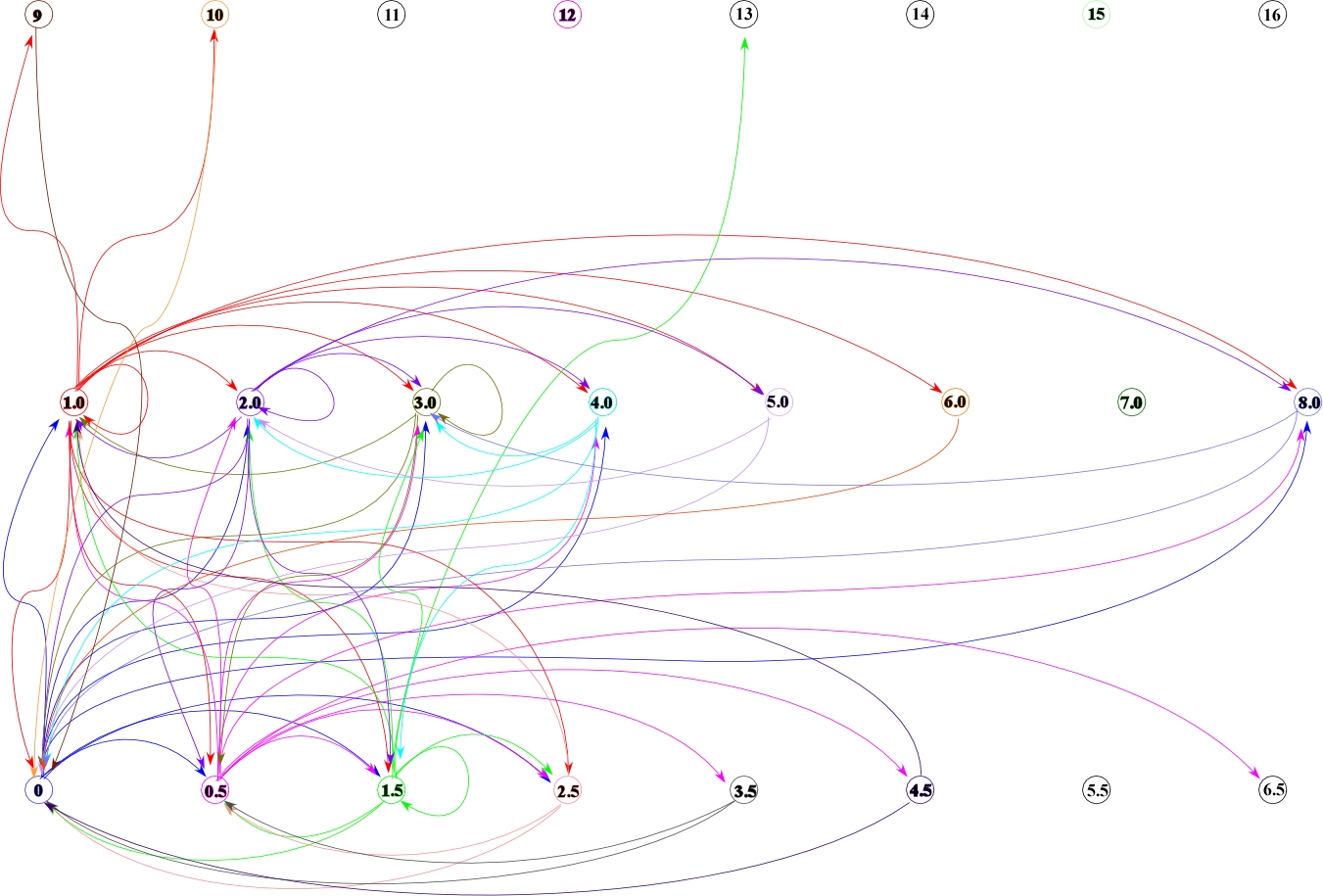
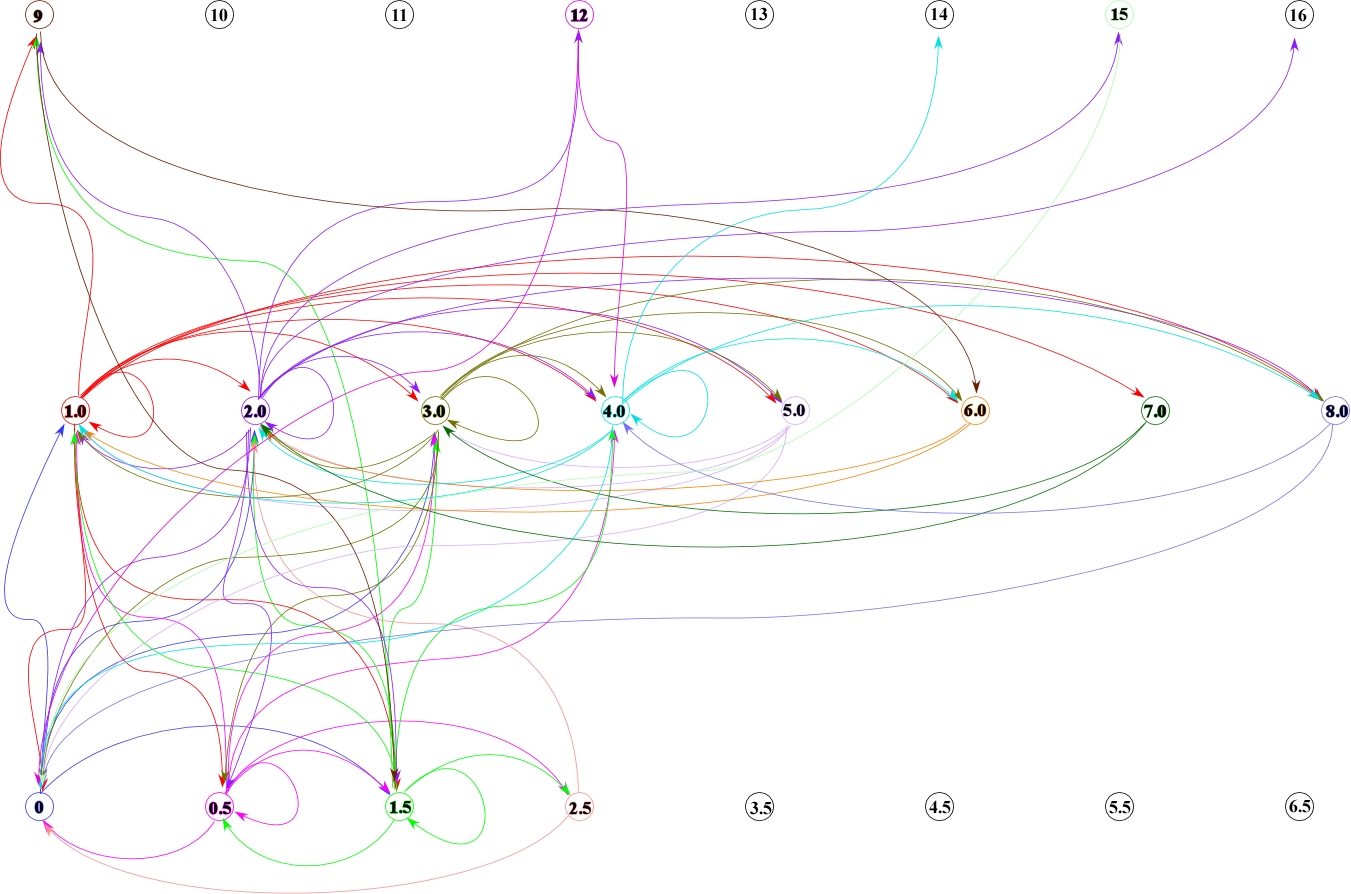
人工知能の応用として、自動作曲システムの研究を行っています。実際に活躍しているアーティストの楽曲から、メロディ部分の音高(音の高さ)と音長(音の長さ)がどのように進行していくかという情報をコンピュータに学習させ、その情報から遷移確率(次にどの音高や音長に進行するかを表す確率)を導出します。導出した遷移確率を用いてコンピュータで自動的に作曲を行うことで、アーティストの特徴を反映した曲が生成されます。学習に用いる曲として、BUMP OF CHICKENの21曲、B’zの32曲、L’arc~en~Cielの15曲を採用しました。また、学習した楽曲には存在しない遷移も低い確率で発生するようにし、突然変異的に新しい曲が作成できるかどうかも試してみました。
作曲した曲
リンクをクリックするとダウンロードできます。
| BUMP OF CHICKEN | B'z | L’arc~en~Ciel | |
| 学習データにない遷移を含む | BUMP(学習データにない遷移を含む).mid | Bz(学習データにない遷移を含む).mid | LArc(学習データにない遷移を含む).mid |
| 学習データにない遷移を含まない | BUMP.mid | Bz.mid | LArc.mid |
遷移確率模式図
| BUMP OF CHICKEN | B'z | L’arc~en~Ciel | |
| 音高 | 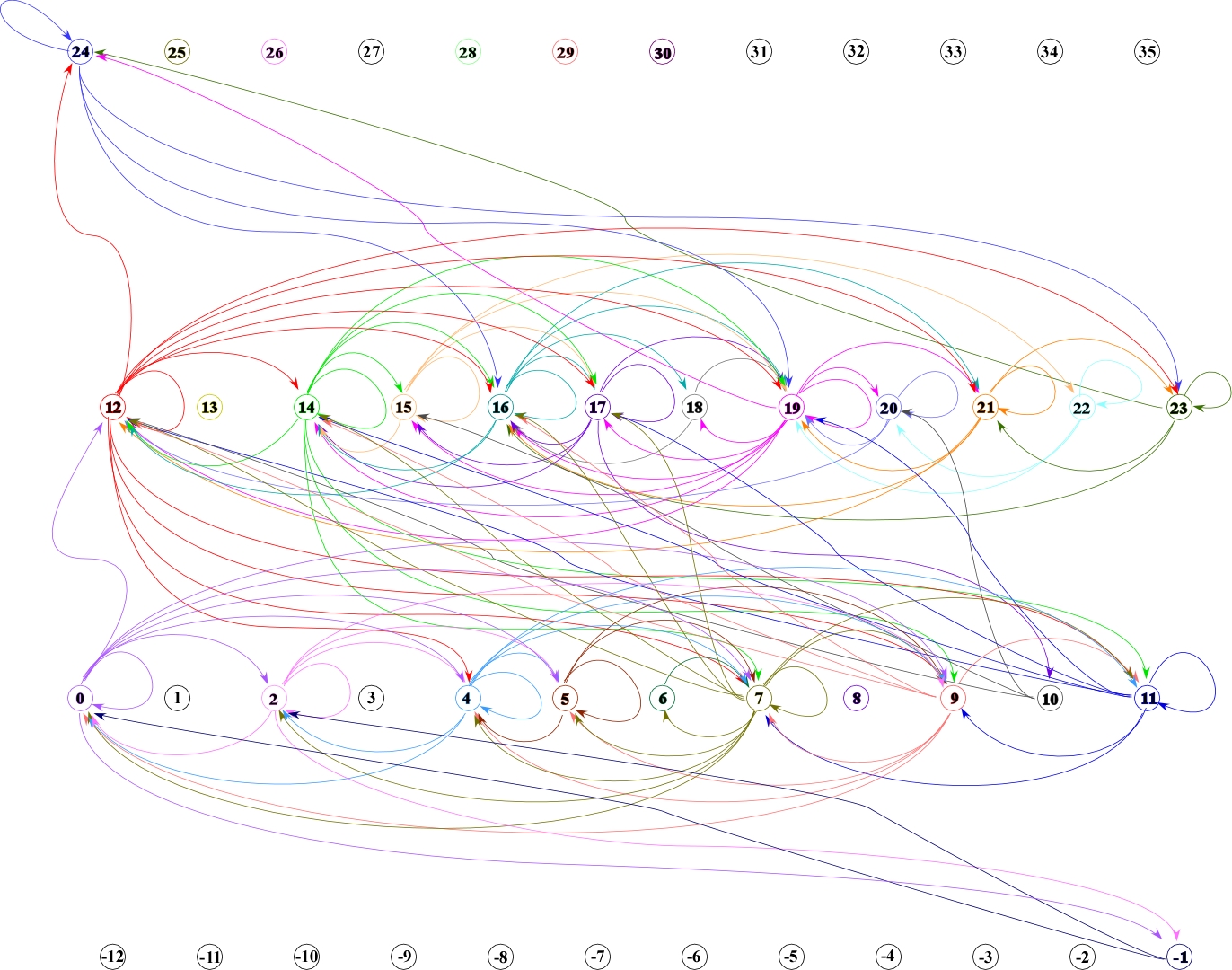 |
 |
 |
| 音調 | 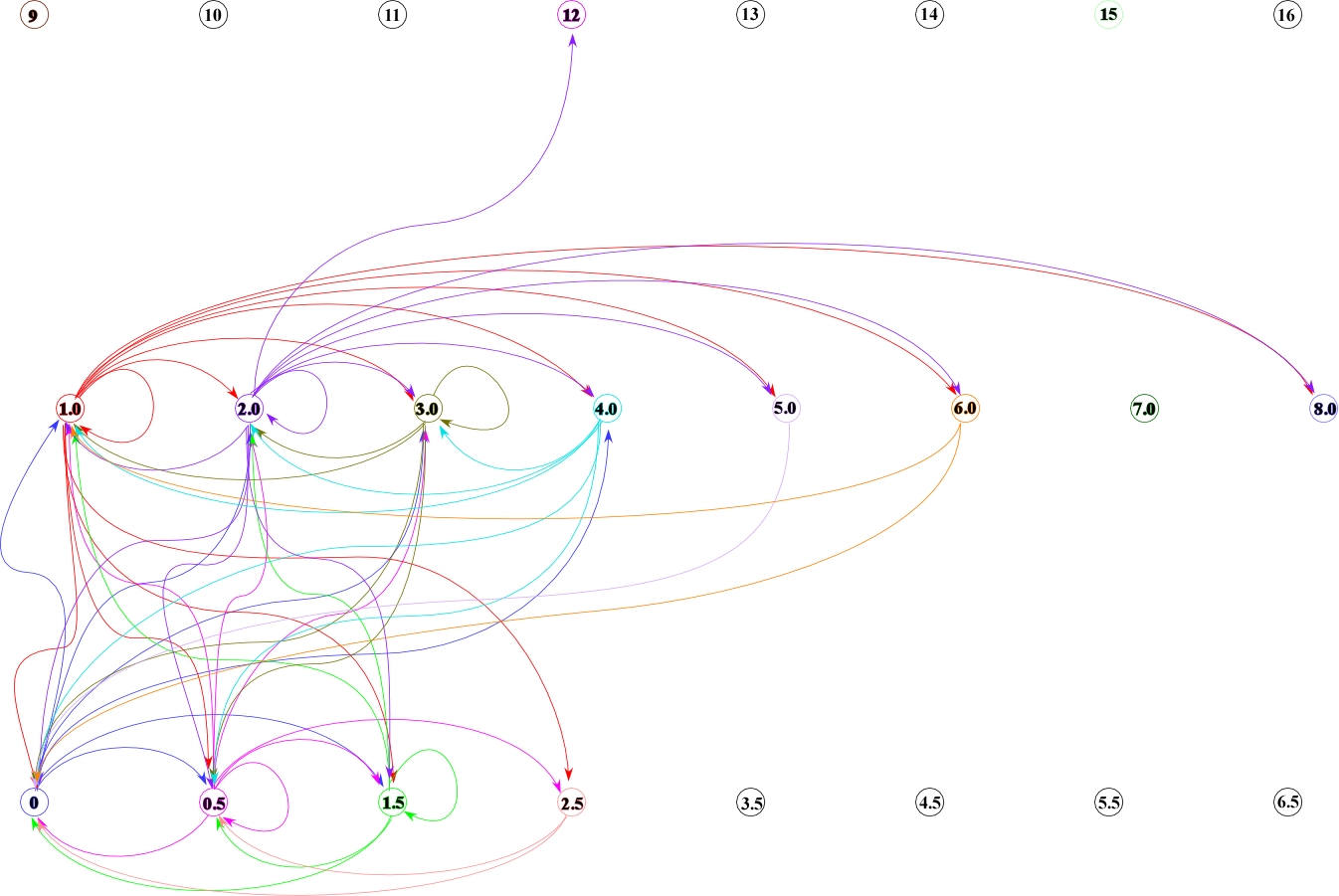 |
 |
 |
*画像をクリックすると拡大画像を表示します。