関西大学システム理工学部 機械工学科
ロボット・マイクロシステム研究室
研究紹介
本研究室ではロボットに搭載することを目的としたMEMSセンサ・アクチュエータ(マイクロマシン)や画像解析、ロボットハンドの作製(ロボット)の研究を行っています。
マイクロニードルの作製
- 高速度カメラによる蚊の穿刺行動の観察
- 非線形有限要素法による針の粘弾性材料への挿入シミュレーション
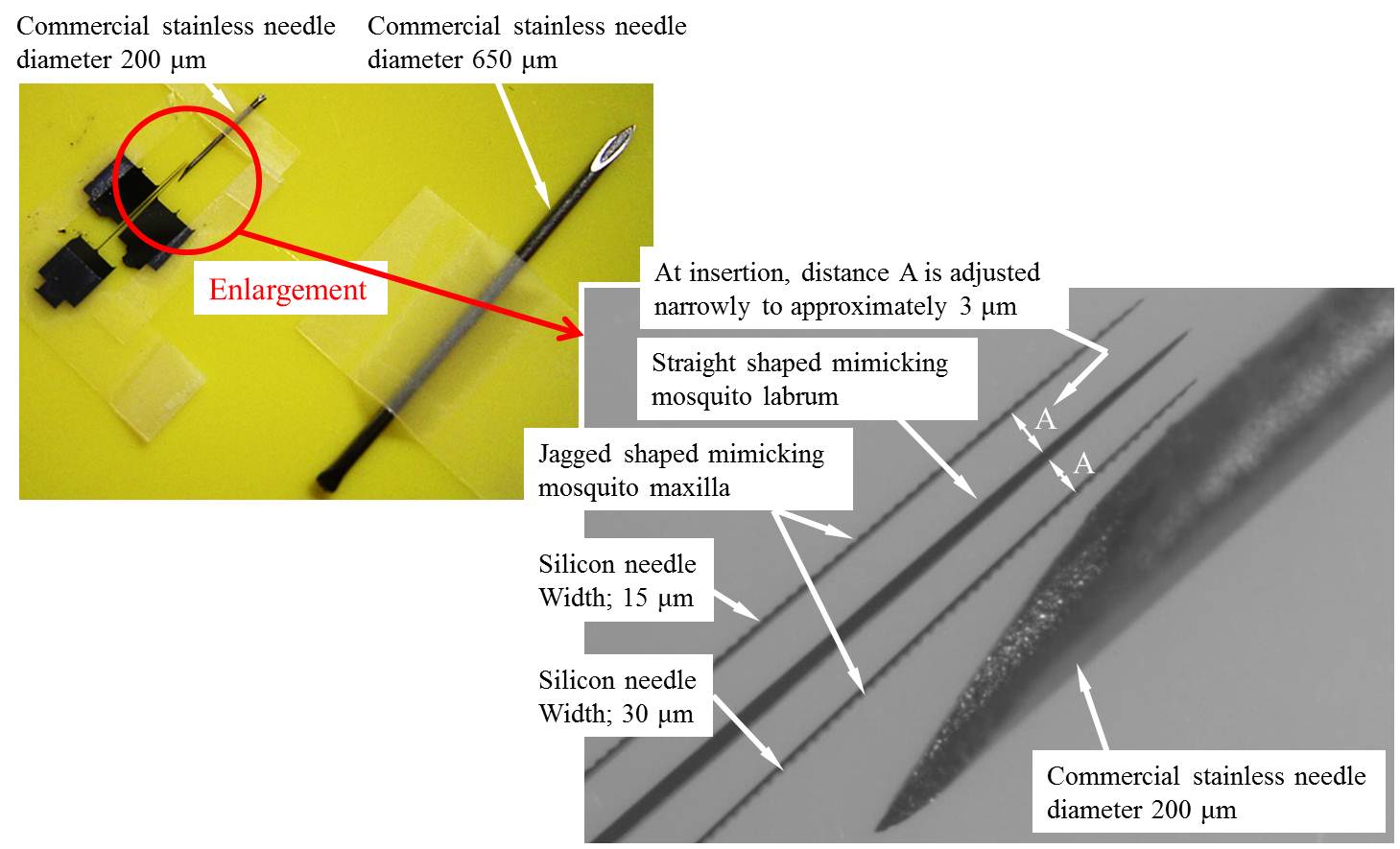
- 蚊の口針を模擬したマイクロニードルの作製
- 複数針の協調動作を実現するためのアクチュエーションシステム
ロボットハンド

機械学習・移動ロボット


- つくばチャレンジ
- ロボカップ@ホーム
- 距離画像センサを用いた外界環境認識
- メタヒューリスティックアルゴリズムや強化学習を用いた軌道計画
- ニューラルネットワークによる接触状態検出と自動組み立てへの応用
- ロボット足裏触覚センサとニューラルネットワークによる情報処理
- 7自由度マニピュレータ搭載の段差乗り越え可能な移動ロボット
- 紫外/赤外線を利用した不可視マーク
- 形状概念による物体認識
- Kinectを用いた物体認識
- Solid Worksを用いた移動ロボットの動作シミュレーション
- 移動ロボットの作製
- iARMを用いた物体の把持
- 自動作曲
研究室について
当研究室では,ロボット・メカトロニクスとマイクロシステムの研究を行っています。現在はロボット班,マイクロ班に分かれて研究を行っていますが,これらを近い将来融合し,ロボットの機能を少しでも人間のそれに近づけることを狙っています。
現在ヒューマノイドロボットが話題となっていますが,2足歩行ができるものの,人間の機能・動作と比較した場合,多くの面でまだまだ劣っているものと考えます。この要因として,1)人間の五感,人間の筋肉に相当する良いセンサ,アクチュエータが無い,2)人間の脳の仕組みが解明されておらず,人間の脳に匹敵する情報処理機能が実現されていない,ことが挙げられると考えます。
人間の視覚,力覚・触覚,聴覚を司る眼,皮膚感覚素子,耳はマイクロサイズの有機素子が巧妙に組織されて成立しています。これを人工的に実現するテクノロジーとして,半導体製造技術を応用して近年急速に発展してきたMEMS(Micro Electro Mechanical Systems)があります.この技術を用いれば,マイクロサイズの極小な機能素子を実現することが可能です。当研究室ではこの技術に着目し,ロボット用のマイクロセンサ,アクチュエータを開発することを目指しています。
人間の脳の仕組みを計算論的アプローチ,心理学的アプローチ,解剖学的アプローチ等により調べる研究が内外の研究機関で多数行われています。当研究室ではそれらの成果をロボットの制御,軌道計画,画像認識,触覚認識等に応用することを目指しています。なおこれとは別に,産業用ロボットの位置・力制御に関する研究,産業用ロボットの機構パラメータのキャリブレーション,不可視マークやRFタグ等の環境整備も視野に入れた福祉・ホームロボットの開発研究も行っています。
またMEMSの研究を進めてきた過程で,医療分野へのMEMS応用にも興味を持っています。当研究室では蚊を模擬したマイクロニードルの作製に注力しており,現状の注射針による採血における痛みを少しでも軽減することを目指しています。
当研究室の研究に興味を持たれた学生諸君,いっしょに研究をしませんか?また企業との共同研究も歓迎します。