経路計画
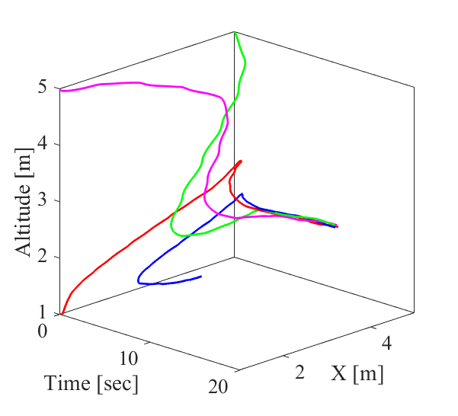
指定された目的地に移動するためには,まず経路を決める必要があります. 例えば,RRT(Rapidly-Exploring Random Tree)を使うと,現在の地図の中で 目的地までのルートをランダム探索を使って見つけることができます. この動画はシンプルな例ですが,更に賢い経路計画の手法や,衝突回避との組み合わせについて研究しています.
本研究室では,ドローンの自律飛行に関する研究を行っています.
群れに興味があり,群飛行に関する研究にも着手中です.
このページは研究のイメージをつかんでもらうことを目的としているため,
かなり大雑把な説明となっています.詳細は,ぜひ直接聞いてください.

目的地までスムーズに移動するための経路計画や,衝突回避を行うための制御について研究しています.
指定された目的地に移動するためには,まず経路を決める必要があります. 例えば,RRT(Rapidly-Exploring Random Tree)を使うと,現在の地図の中で 目的地までのルートをランダム探索を使って見つけることができます. この動画はシンプルな例ですが,更に賢い経路計画の手法や,衝突回避との組み合わせについて研究しています.
ボロノイ分割は,領域を分割する方法の一種です.
このボロノイ分割をうまく使うと,各ドローンが自分に割り当てられた安全な領域内だけを飛行することで,障害物や他のドローンとの衝突回避をしながら目標位置に移動できます.
モデル予測経路積分制御とは,乱数を使って将来の経路をたくさんサンプリングし,良い経路を通ることのできる制御入力を優先して採用することで,リアルタイムに良い感じの制御入力生成できる手法です.
右の動画は,2箇所にスリットのある壁が存在する環境で,黄色の★が,なるべく x=0(真ん中)付近を移動するように制御した時の様子です.前方に沢山の経路を生成して予測することで,壁にぶつからずに移動できています.これを応用すると,クワッドロータが墜落したり障害物に衝突したりすることなく移動するための制御入力をリアルタイムに生成できます.
地上にある管制塔を使ってドローンの群れを一括制御する場合,管制塔が全ての指示を出すため,個々のドローンは自分で考える必要はなく,管制塔の指示通りに動けば良いことになります.その代わりに,全てのドローンが常に管制塔と通信し続けて指示を受け取る必要があるので,通信環境が悪いと,ドローンは指示を受け取れずに立往生してしまう可能性があります.そこで,管制塔がなくてもドローン同士が協調して飛行できる,自律分散型の制御について研究しています.
リーダードローンが群れを引率し,複数のフォロワードローンはリーダーの動きを見ながらフォーメーションを組んでついていくことで,管制塔なしに移動する手法について研究しています.

隣のドローンの様子を見て(位置情報を参照して)自分の移動先を決めるための方法について研究しています. ここでは,リーダーが不在なので,全員が隣のドローンだけを見て少しずつ位置を合わせるため,平均的な位置に集まってきます.

小型ドローンの場合,高性能なセンサを搭載する余裕がない場合も多くあります.そこで,ドローンがカメラで「見た」情報を使って何かを追いかけたり,向かってくる人を避けたりするための研究に取り組んでいます.
YOLOという物体検出手法でドローンのカメラ画像をリアルタイムに処理し,その結果を使って飛行制御を行っている様子です.左の動画は定点カメラの映像,右の動画はドローンのカメラ画像をYOLOで処理した映像です.ここでは,机にのったテディベアを動かした場合でも,テディベアがカメラの中心にくるように,ドローンが前後左右に移動しています.

DepthAnythingという,カメラ画像から奥行方向の距離をリアルタイムに推定できる手法があります.これをYOLOと組み合わせて工夫することで,近づいてくる人がどちらに向かっているのか予測し,向かってくる人を効率よく避けることができます.

その他の応用として,ドローンのカメラ画像をYOLOでリアルタイムに処理し,カメラに映った物体が,3次元空間内のどの位置にあるかをプロットした物体位置マップを作成することもできます.
